AlexaボイスコマンドCMD
- AlexaボイスコマンドCMDのTips
- Alexaのボイス・コマンドでSwitchのオンオフする際にhomebridge-cmdプラグインを使っている・・・/var/log/homebridge.log抜粋
[18/08/2022, 12:14:12] [照明] Setting power state to on
[18/08/2022, 12:14:13] [照明] power function succeeded!
[18/08/2022, 12:14:13] [照明]
[18/08/2022, 12:14:21] [照明] Setting power state to off
[18/08/2022, 12:14:22] [照明] power function succeeded!
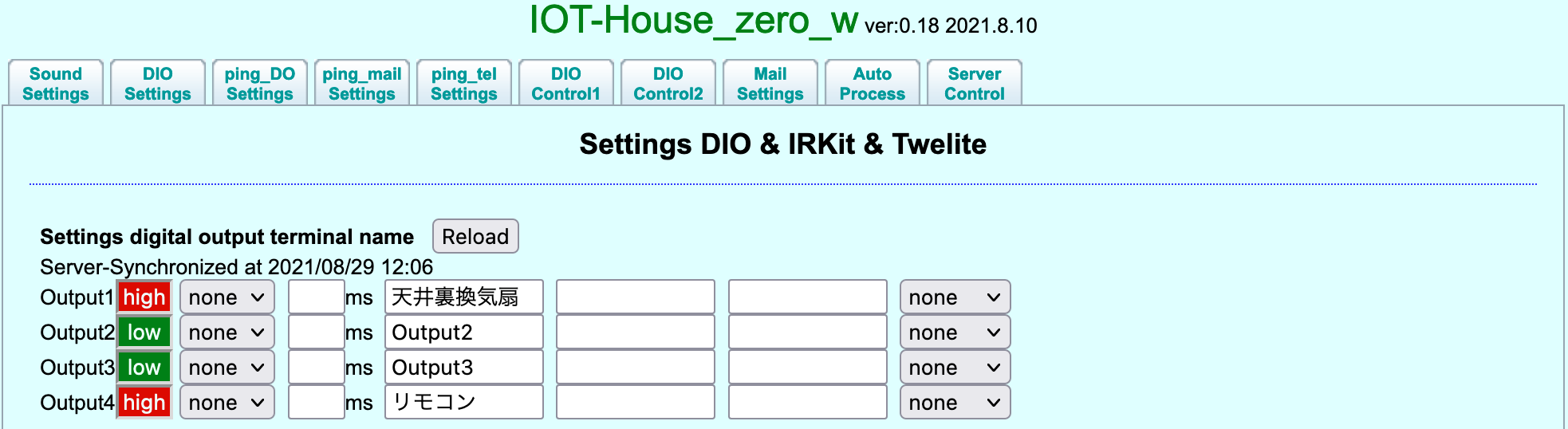
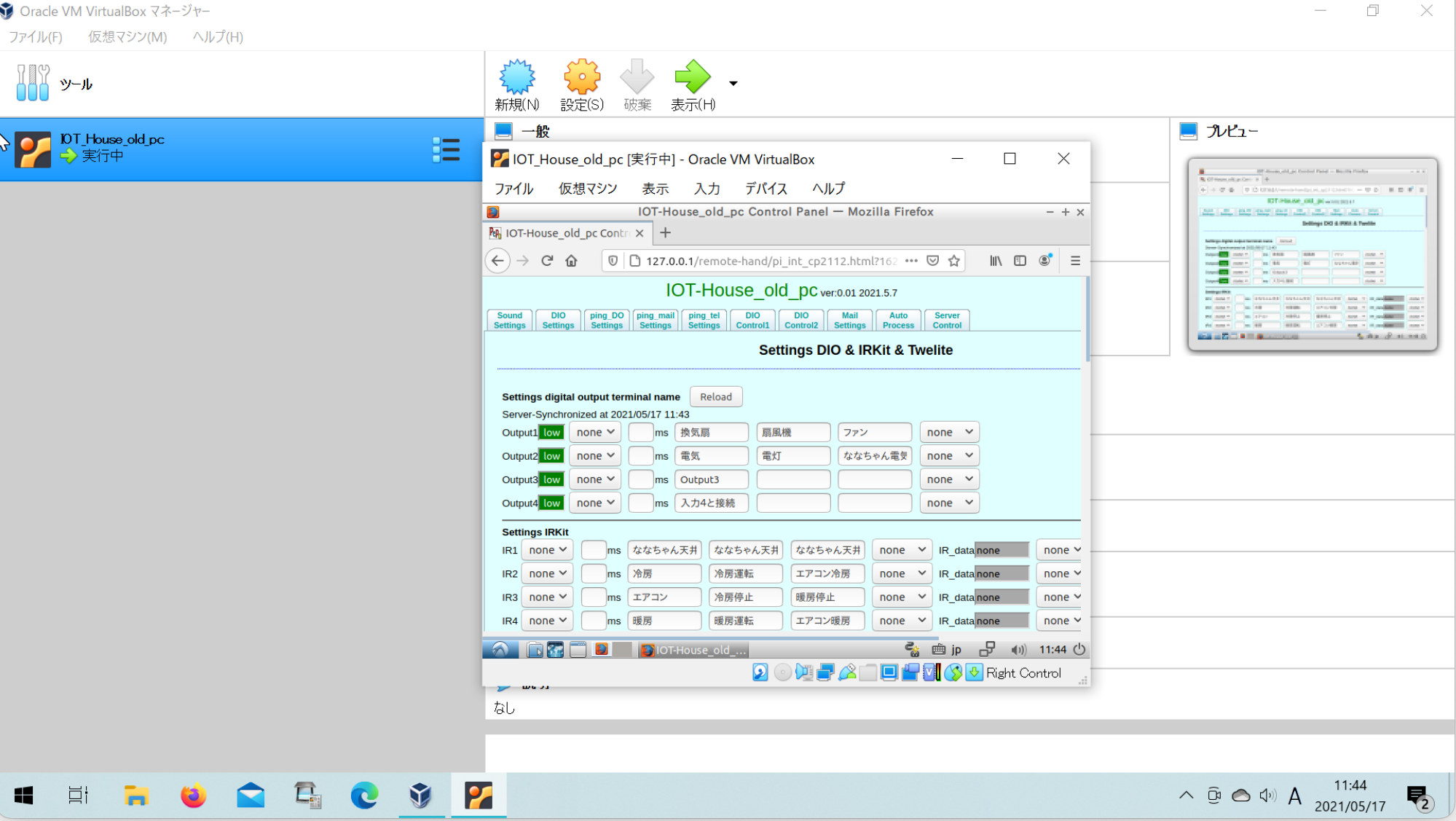
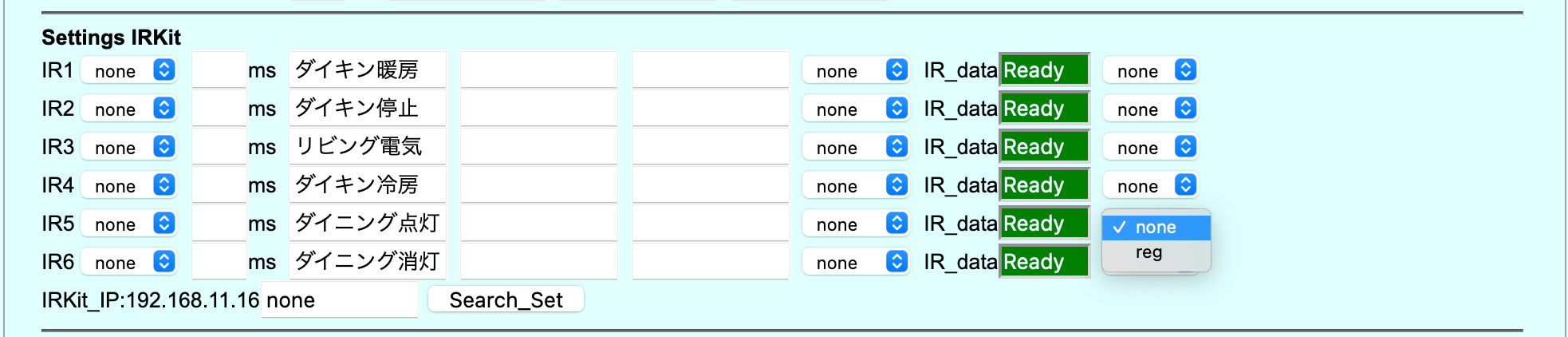
[18/08/2022, 12:14:22] [照明] - 照明やシーリングライトなどオンオフには学習型赤外線リモコンIRkitを使う
- アレクサ照明つけて・・・「照明」IRデータは「iot001.local」の仮想ポート8番に登録されコマンドで「iot001.local」がIRkitへ送信する
- homebridge config.json抜粋
{
“accessory”: “CMD”,
“name”: “照明”,
“on_cmd”: “sudo /usr/local/bin/pepoalexacmd_on iot001.local remote hand 8 1”,
“off_cmd”: “sudo /usr/local/bin/pepoalexacmd_off iot001.local remote hand 8 1 5000” - アレクサ照明けして・・・オンオフが同一IRデータ、一度目はスモール点灯、二度目に消灯なので5秒後に再送信で消灯
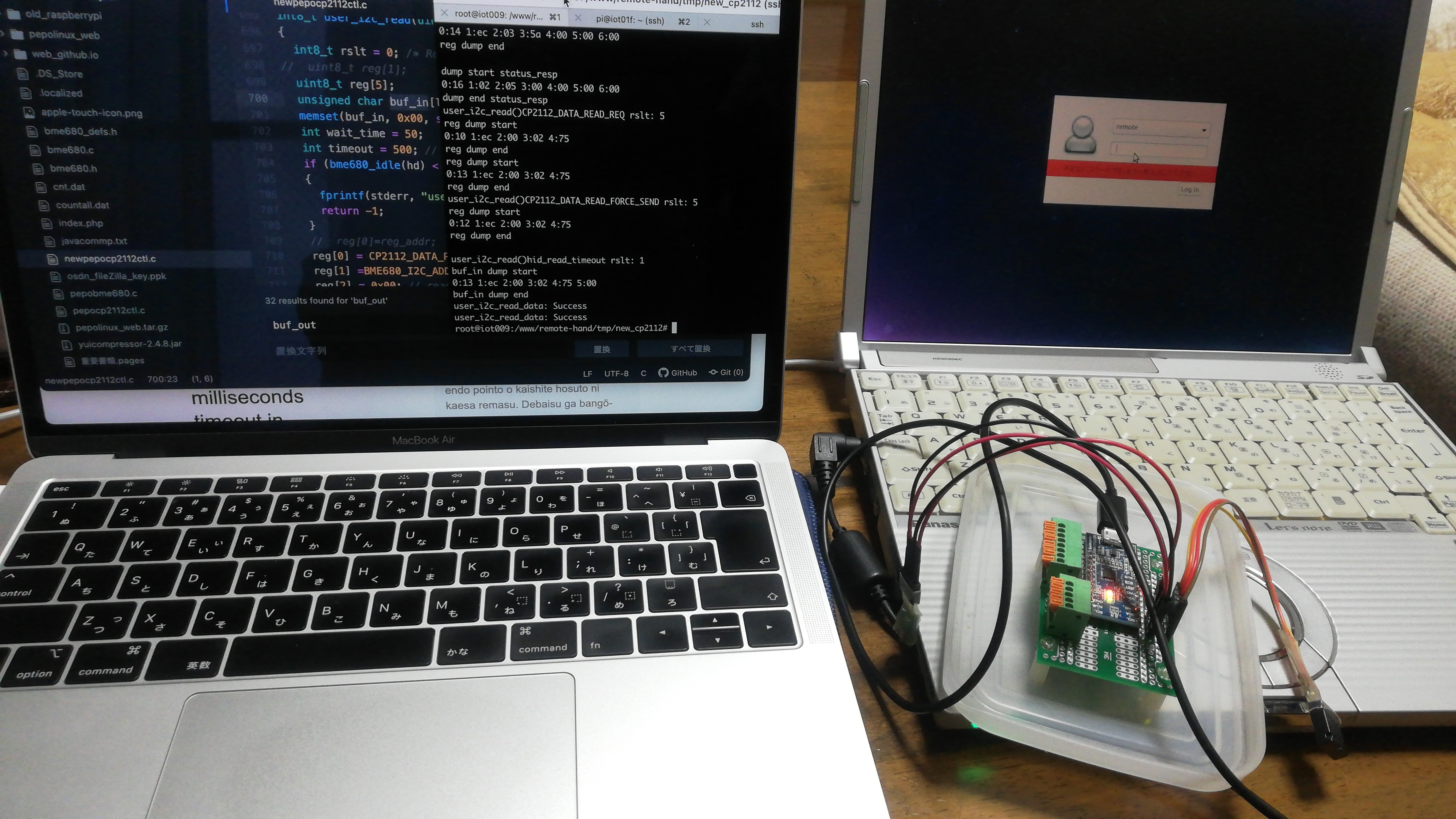
- pepoalexacmdコマンドを確認
pepoalexacmd_onとpepoalexacmd_offへSymbolic link
https://github.com/kujiranodanna/IOT-House/blob/master/raspberrypi/usr/local/bin/pepoalexacmdホストネーム解決とWake upの為ping3回行いpepoalexadoをバックグランド処理1
2
3
4
5
6
7
8
9
10
11
12
13#!/bin/bash
.
# ln -s pepoalexacmd ./pepoalexacmd_on; ln -s pepoalexacmd ./pepoalexacmd_off
.
PROG=pepoalexacmd
CMD=$DIR/$PROG.pepocmd
ALEXADO=/usr/local/bin/pepoalexado
.
cat >$CMD<<END
#!/bin/bash
ping -c 3 $1 >/dev/null
$ALEXADO $1 $2 $3 $4 $5 $6
END
pepoalexadoを直接叩くとホストネーム解決とWake upでAlexa側でタイムアウトになる事も - pepoalexadoコマンドを確認・・・リモートホストへ引数をポスト
https://github.com/kujiranodanna/IOT-House/blob/master/raspberrypi/usr/local/bin/pepoalexadocurlのリモート・ホストネーム解決やWake upに時間が掛かりタイムアウトが発生していると思われる1
2
3
4
5#!/bin/bash
.
PROG=pepoalexado
.
curl -s --connect-timeout $RETRYTIME --retry $RETRY --max-filesize $GETSIZE --user-agent ${USERAGENT} --tlsv1 -k -u ${USER}:${PASSWORD} -X POST -d $data https://$RM_HOST:$PORT/$REMOTE_CGI >${WORK}
- Alexaのボイス・コマンドでSwitchのオンオフする際にhomebridge-cmdプラグインを使っている・・・/var/log/homebridge.log抜粋
Homebridge-alexaとIRkit音声コマンド・デモ
 2. DIO Control-2
2. DIO Control-2